廠家熱賣 品質保障 專業專注
用心服務好每一位客戶
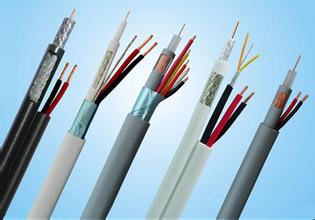
數十種系列產品
1000多個規格
多芯可選
支持定制
規格齊全
MCP礦用采煤機電纜
采煤機電纜

MHYVP礦用通信電纜
礦用通信電纜

MYPTJ高壓礦用橡套電纜
礦用橡套電纜

MYPTJ礦用金屬屏蔽橡套電纜
屏蔽橡套電纜

礦用鎧裝屏蔽電纜
鎧裝屏蔽電纜

屏蔽控制電纜
屏蔽控制電纜

MCPT采煤機屏蔽電纜
屏蔽電纜

MYP橡套電纜
MYP橡套電纜

品質決定未來
高純度銅

安全環保

抗壓性強

壽命更長

海南網絡海底電纜受到各種外部危害,如海流侵蝕和船舶在運行中的錨定。此有必要對海底電纜進行全面檢測。使用ROV安裝的檢查設備時,必須提供ROV和檢測設備的精確水下定位,以確保準確檢測。要分析了三種水下定位系統(長基定位系統,短基定位系統,超短基本系統)的原理,優缺點和適用性。析結果表明,使用超短基本定位系統可以滿足精確的海南網絡集成水下探測系統的需求。下電纜;全面檢測;水下定位;短期定位基準中圖分類號:P715.5文獻標識碼:A DOI:10.15913 / j.cnki.kjycx.2016.09.009海南網項目是第一個500千伏中國項目邊界電網很高壓,長距離,大容量。底電纜網絡工程的北部是南嶺徐聞在廣東省湛江市的村莊,穿越瓊州海峽,并達到峰值Yubian海南島附近Chengmailinshi,d長度約32公里/根。約2公里。南網絡項目提高海南電網運行的可靠性和能源質量海底電纜的穩定性和可靠性對海南社會經濟的發展起著重要作用。海底光纜的操作中,隨著時間和電流的作用下,海底電纜的涂層將被洗掉,海底電纜暴露于海底并且甚至可以從底部懸置大海。底電纜附近的海上作業將使海底電纜正常運行。來巨大風險。此,必須定期對海底電纜進行全面檢查。
中,水下線纜,巖石壩和厚度的情況下,深度的檢測以及檢測所述海底電纜的鑄造殼體的狀態是非常元素重要的。了獲得海底電纜當前狀態的更詳細和詳細的細節,使用配備埋藏深度探測設備(TSS系列)的水下機器人進行綜合探測。
測過程必須向ROV提供準確的定位信息,即必須完成。精度水下定位。下定位方法和原理分析目前,水下導航定位技術基于導航和聲學定位技術,分為三個聲學導航和定位系統,即長基本定位系統。超短基本定位系統。基礎定位系統的長基準位置是測量目標的水下聲源相對于每個基元的時間差,以解決目標的方位角和距離并獲得準確的目標三維位置,為水下建設和研究提供準確的工作。置服務。基線定位系統通常包括三個部分,即船上的數據處理系統,安裝在定位目標或船上的聲學收發器,放置在船底部的定位組件。海由幾個轉發器組成。用(x,y,z)定位安裝在控制容器或水下機器人上的收發器,使用(x,y,z)代表潛艇機器人的三維坐標,使用(xi,yi) ,ZI)(I = 1,2,3)來表示的Ti接觸中繼器的海底的坐標,和Ri(i = 1,2,3)是跟蹤對象和下應答器之間的距離馬里諾。1顯示了基于長期的定位系統。發器(潛艇機器人)和應答器之間的空間交叉距離可以表示為:R22 =(x-x2)2 (y-y2)2 (z-z2)2。(1)求解方程式可以獲得水下機器人的三維坐標。

據測量調諧原理,在實際應用中,需要從上海的下部應答器接收四個信號,以產生冗余觀測,從而滿足最小二乘調整原理,提高測量精度。基線定位系統短基線定位系統的名稱來自其小尺寸:超過三個基元,基線的長度通常大于10米,通常在基線的底部運行。用基地的聲信號船或船的一側。算元素與目標之間的時間差,然后獲得測量目標的方位角和距離信息,并導出目標的坐標。2顯示了短基本定位系統的配置。圖2中,H1,H2和H3是水聽器,O是換能器(它也是殼體空間的笛卡爾坐標系的中心)。聽器正交排列,H1和H2之間的基線長度為b,指向弧線,即X軸的方向.H2和H3之間的基線長度等于平行于軸Y,對船舶的右側,和Z軸,海的底部。線和所述三個坐標軸分別θmx,θmy.theta..sub.m和z之間的角度,并Δt1和Δt2是H1和H2接收的聲信號之間的時間差,并且H2和H3H2是一個例子。據距離 - 方位角方法,可以直接從圖3中獲得用于計算目標對象的坐標的公式:y = S·Cosθm。(2)超短基本定位系統超短基本定位系統安裝在收發器中,形成聲音矩陣。確測量聲音單元之間的距離,形成聲音矩陣坐標系。安裝過程中,需要準確地確定聲學網絡坐標系與船體坐標系之間的關系,即確定船體坐標系的位置偏差。對船體和聲學網絡裝置的偏轉角(側傾角,俯仰角和水平旋轉)。)。統通過測量聲學元件的相位差來確定換能器的方向(垂直和水平角度)。過測量聲波傳播的時間,然后用聲音的速度分布校正光束線來確定換能器和目標之間的距離。如,圖。4示出了由四個元件組成的水聽器網絡的超短基本定位系統。
圖4中,標號1,2,3和4示出矩陣的四個元素,軸線x和1和2以及縱坐標4和3中的兩個軸相交于元件和中心的中心是垂直的。上是z軸的方向。T是目標,距元素中心的距離是R,元素1,2之間的間距和3,4的間距是相同的,即間距的方向坐標系中的元素dT是θx,θy,θz,它可以通過該元素。定傳播延遲。
個待測物體角度的余弦如下:(3)。(4)測量轉向角的基本公式如下:(5)在等式(5)中:x是由光柵測量的元件之間的相位差。
可以從定位公式獲得:y =Rcosθy。(6)其中.theta.x,.theta.y,
礦用電纜θZ滿足基本要求:水下定位系統判斷3個水下定位系統的原理的 cos2θxcos2θycos2θz = 1效益分析和缺點,在結合各種定位系統的匹配設備和裝置的校準方法,得到了這三種潛艇定位系統的優點,缺點和應用可能性。1三種水下定位系統的優缺點優點缺點長基線定位系統無需進行大量校準工作,可在較寬范圍內實現高定位精度,工作距離長,定位精度與水深無關。基準定位系統系統集成的價格遠低于長基定位系統的價格。本的長線定位系統簡單,實用,靈活。量范圍包括可接收信號的矩陣的所有區域,工作范圍比超短基本定位系統寬。水區域提供高測量精度。舶尾流中斷可能會影響裝置的安裝位置。高,需要更大的船。系統安裝時,必須將基本元件穩定地固定到容器的底部并精確測量元件之間的相互位置關系,難以測量。常,有必要將船駛向碼頭以精確測量和校準超短基地定位系統。陣的尺寸小,安裝和使用實用,價格相對較低,遙測精度高。合GPS和指南針,大大降低了潮汐,潮汐等因素對水下測量設備位置測量精度的影響。使用之前,長距離誤差的發散很快,很短的參考距離動作不是很大定位精度不高,但考慮到水深的事實瓊州海峽距離不足100米,水深較低,USBL潛艇定位系統精度較高。一結論增加了海南網絡海底電纜的實際需求,以檢測潛艇機器人的定位。定位系統的原理,優點,缺點和適用性表明,長基線定位系統定位精度最高,但價格昂貴,適合控制和維護。
于原始與船舶之間的距離較遠,深海區域和深海區域的位置以及基于短距離的定位系統。流對元件擾動的影響對船舶有很高的要求,必須在碼頭安裝校準。短基本定位系統體積小,安裝方便,價格低廉,安裝方便。
位精度高。要求完全滿足海南網絡海底電纜的需求,以檢測潛艇機器人的定位。此,超短基地定位系統被用于水下定位,作為海南500千伏水下海底電纜項目的一部分。
本文轉載自
電纜價格 http://www.sup95.com
 微信咨詢報價
微信咨詢報價